Key Applications of CNC Gear Cutting in Modern Robotics

PAGE
By PAGE Editor
Japanese collaborative robot manufacturer experiencing 18% field failure rate traced problem to gear backlash—harmonic drive flex spline components machined to DIN 5 quality grade (±18μm tooth spacing variation) caused 0.25mm positioning errors during micro-assembly operations, customer returns costing ¥127M annually. Root cause: Inadequate gear precision for precision robotics applications. Solution: Upgrade to DIN 3 quality (±8μm variation), implement CNC gear cutting process overview including hobbing, grinding, and laser inspection ensuring AGMA 12 accuracy. Results: Backlash reduced 68% (<0.08mm vs 0.25mm), positioning accuracy ±0.04mm (within spec), field failures 2.3% (87% improvement), annual savings ¥98M through eliminated returns, warranty claims, reputation recovery.
This demonstrates CNC gear cutting's criticality in robotics manufacturing applications: positioning accuracy (backlash <0.1mm typical industrial robots, <0.02mm surgical robots), torque density (compact gearboxes enabling lightweight arms), durability (10⁶-10⁷ cycle life requirements), noise reduction (<60 dB collaborative robots human interaction)—precision gear manufacturing determining robot performance, reliability, commercial viability applications demanding micron-level motion control.
CNC Gear Cutting Methods for Robotics Applications
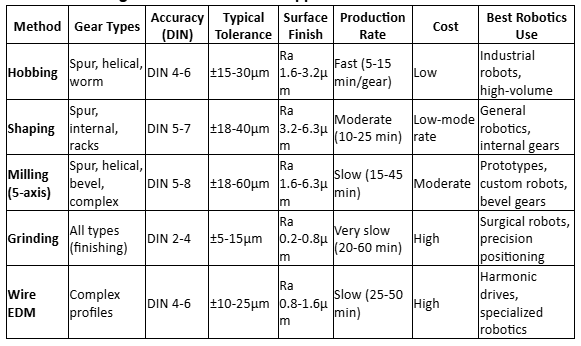
Selection criteria: Industrial robots (moderate precision, high volume) → Hobbing. Surgical robots (ultra-precision) → Grinding. Collaborative robots (low noise, compact) → Ground helical or harmonic drives. Prototypes → 5-axis milling.
Robotic Gear Types and Performance Requirements
Spur gears (parallel shafts):
Applications: Simple robot joints, linear actuators, low-cost industrial robots
Advantages: Easy manufacturing, high efficiency (95-98%), lowest cost
Disadvantages: Noisy (80-90 dB typical), vibration, lower torque density
Typical specs: Module 0.5-3mm, face width 10-50mm, ratios 2:1 to 8:1
Helical gears (angled teeth):
Applications: Precision robots, collaborative robots, multi-axis arms
Advantages: Quiet operation (60-70 dB), smooth torque transfer, higher load capacity
Disadvantages: Axial thrust loads, 15-25% more expensive than spur
Typical specs: Helix angle 15-30°, module 1-4mm, ratios 3:1 to 10:1
Planetary gearsets (compound epicyclic):
Applications: Robot joints requiring compact high-ratio reduction, compact designs
Advantages: High torque density (3-5× spur equivalent volume), coaxial input/output, load distribution
Disadvantages: Complex manufacturing, backlash accumulation, higher cost
Typical specs: Ratios 3:1 to 100:1 single-stage, 10:1 to 500:1 multi-stage
Harmonic drives (flex spline technology):
Applications: Collaborative robots, surgical robots, precision positioning (ultra-low backlash critical)
Advantages: Near-zero backlash (<1 arcmin), ratios 30:1 to 320:1 single-stage, compact
Disadvantages: Expensive (5-10× planetary equivalent), limited speed (3,000 RPM max input), specialized machining
Typical specs: Torque 5-3,000 Nm, backlash <20 arcsec (0.006°), efficiency 70-90%
Industrial Robotics: Precision Gear Requirements
6-axis articulated robots (welding, assembly, material handling):
Joint 1-3 (base, shoulder, elbow): Planetary gearsets, ratios 50:1 to 160:1, torque 500-5,000 Nm, backlash <3 arcmin
Joint 4-6 (wrist): Harmonic drives or compact planetaries, ratios 50:1 to 100:1, torque 50-500 Nm, backlash <1 arcmin
Positioning accuracy: ±0.05-0.15mm (depends on gear precision, typically DIN 4-5 quality)
SCARA robots (assembly, pick-and-place):
Horizontal joints: Helical gears or harmonic drives, low backlash (<2 arcmin), high-speed capable (5,000+ cycles/hour)
Vertical axis: Ball screw or planetary gear, positioning ±0.01-0.05mm
Delta robots (high-speed packaging):
Actuators: Direct drive or planetary gears, ratios 5:1 to 20:1, speed >10,000 cycles/hour, lightweight (aluminum or composite materials)
Collaborative Robots: Unique Gear Demands
Cobot-specific requirements:
Low noise: <65 dB operation (human workspace acceptable), ground helical gears or harmonic drives
Back-drivability: Low friction (0.05-0.15 Nm breakaway torque) enabling force sensing, safety
Compact design: Harmonic drives enabling slim arm profiles (80-120mm diameter typical)
Zero backlash: Positioning accuracy ±0.02-0.08mm (assembly tasks requiring precision)
Example: Universal Robots UR5—harmonic drive gearboxes (100:1 ratio typical), backlash <30 arcsec, positioning repeatability ±0.03mm, payload 5kg.
Surgical Robotics: Ultra-Precision Gear Machining
da Vinci Surgical System requirements:
Gear accuracy: DIN 2-3 quality (±5-10μm), ground teeth (Ra 0.2-0.4μm surface finish)
Backlash: <10 arcsec (0.003°) enabling 0.01mm surgical tool positioning
Sterilization: 134°C autoclave-compatible materials (stainless 17-4PH, titanium), corrosion resistance
Size: Miniature gears (module 0.3-1.5mm), 8-25mm diameter, weight <50g
Machining challenges: Micro-gear cutting (small modules), heat management (thermal distortion >5μm unacceptable), inspection (CMM or optical measurement required), material hardness (55-62 HRC post-heat-treat).
Autonomous Mobile Robots: Drivetrain Gears
AGV/AMR applications (warehouse, logistics):
Drive motors: Planetary gearsets, ratios 10:1 to 50:1, torque 50-500 Nm, efficiency >85% (battery life critical)
Steering actuators: Worm gears or harmonic drives, self-locking (prevents rollback), positioning ±1-3°
Material: Aluminum housings (weight reduction), hardened steel gears (durability), engineered plastics (noise reduction)
Example: Typical AGV—500kg payload, 2× 500W motors, 20:1 planetary gears, 1.5 m/s speed, 100,000+ operation hours lifespan.
Manufacturing Considerations: Precision and Cost Trade-offs
Gear accuracy impact on robot performance:
DIN 7-8 (hobbed, unground): Backlash 0.15-0.30mm, positioning ±0.2-0.5mm, adequate material handling robots
DIN 4-5 (hobbed + shaved/ground): Backlash 0.05-0.15mm, positioning ±0.05-0.15mm, standard industrial robots
DIN 2-3 (precision ground): Backlash <0.02mm, positioning ±0.01-0.05mm, surgical/precision assembly robots
Cost progression: DIN 6 baseline, DIN 4 (+40-60%), DIN 3 (+100-150%), DIN 2 (+200-300%)—justified only when positioning accuracy genuinely requires.
Companies like FastPreci specialize in precision robotics manufacturing applications—combining advanced CNC gear cutting process overview (5-axis milling, grinding, EDM capabilities) with robotic-specific expertise (harmonic drive components, planetary gearsets, miniature surgical robot gears), quality systems ensuring DIN 2-4 accuracy, inspection protocols (CMM, gear analyzers) validating tooth geometry, backlash, concentricity—critical for robotics where gear precision determines positioning accuracy, operational lifespan, commercial success applications demanding micron-level motion control reliability.
Material Selection for Robotic Gears
Steel alloys (most common):
4140/4340 alloy steel: 280-320 HB (through-hardened), general robotics, moderate cost
8620/9310 carburizing steel: 58-62 HRC case (8-12mm deep), core 30-40 HRC, high-load industrial robots
Stainless 17-4PH: 38-44 HRC, surgical robots (autoclave sterilization), corrosion resistance
Lightweight alternatives:
Aluminum 7075-T6: 150 HB, prototype robots, weight-critical (drones), lower strength
Titanium Ti-6Al-4V: 36 HRC, aerospace robotics, exotic/expensive
Engineered plastics (PEEK, POM): Quiet operation, corrosion-proof, lower torque capacity
Future Trends: Advancing Robotic Gear Technology
Additive manufacturing integration: 3D-printed gear blanks with CNC-finished teeth (complex internal geometries, weight optimization)
Smart gears: Embedded sensors (torque, temperature, wear monitoring), predictive maintenance
Hybrid materials: Steel cores + polymer coatings (noise reduction + strength)
AI-optimized tooth profiles: Machine learning designing non-standard geometries reducing backlash, vibration
FAQs: CNC Gear Cutting for Robotics
What is CNC gear cutting?
Computer-controlled machining producing precision gears via hobbing (rotating cutter generating teeth), shaping (reciprocating cutter), milling (multi-axis indexing), or grinding (finishing for ultra-precision). Advantages: Micron-level accuracy (±5-30μm typical), repeatability (consistent quality 1,000s parts), complex geometries (bevel, helical, internal), inspection integration. Robotics application: Enables positioning accuracy, low backlash, durability requirements impossible manual/conventional machining.
Why are gears critical in robotics?
Convert motor speed to torque (typical robot motor 3,000 RPM → joint 30 RPM via 100:1 gear), enable precise positioning (gear backlash directly affects robot accuracy), provide mechanical advantage (5kg motor moves 50kg payload via 10:1 reduction), compact design (planetary/harmonic gears fit tight spaces). Failure impact: Positioning errors, vibration, premature wear, downtime—gear quality determines robot reliability, lifespan, performance.
What gear types are used in robots?
Industrial robots: Planetary gearsets (compact high ratios), helical gears (smooth/quiet). Collaborative robots: Harmonic drives (zero backlash, back-drivable). Surgical robots: Miniature ground gears (ultra-precision). Mobile robots: Spur/helical drive gears (efficiency). Delta robots: Direct drive or low-ratio planetaries (speed). Selection: Depends on torque, speed, precision, size, noise, cost requirements.
How precise are CNC cut gears for robotics?
DIN quality grades: DIN 8 (±60μm, low-precision), DIN 5 (±18μm, standard industrial), DIN 3 (±8μm, precision robotics), DIN 2 (±5μm, surgical robots). Backlash: Industrial robots 0.05-0.15mm, collaborative robots 0.02-0.05mm, surgical robots <0.01mm. Positioning: Gear precision determines final robot accuracy—DIN 4 gears enable ±0.1mm positioning, DIN 2 enable ±0.02mm.
What materials are used for robotic gears?
Steel alloys: 4140 (280 HB general), 8620 carburized (58-62 HRC surface, high-load), 17-4 stainless (surgical sterilization). Lightweight: Aluminum 7075 (prototypes), titanium (aerospace). Plastics: PEEK, POM (quiet, corrosion-proof, lower strength). Selection: Steel most common (strength, durability, cost), stainless surgical robots, aluminum weight-critical, plastics noise-sensitive cobots.
What is a harmonic drive and why use it in robots?
Flex spline gear technology achieving near-zero backlash (<1 arcmin), high ratios (30:1 to 320:1 single-stage), compact design (coaxial in/out). Robotics advantage: Collaborative robots (back-drivability, precision), surgical robots (positioning <0.01mm), multi-axis arms (compact joints). Trade-offs: Expensive (5-10× planetary), limited speed (3,000 RPM max), specialized machining. Common: UR cobots, da Vinci surgical, precision assembly robots.
What tolerances are needed for robot gears?
Application-dependent. Material handling: ±0.2-0.5mm positioning (DIN 6-7 gears adequate). Standard industrial: ±0.05-0.15mm (DIN 4-5). Precision assembly: ±0.02-0.05mm (DIN 3). Surgical: ±0.01mm (DIN 2, ground gears). Factors: Gear accuracy (tooth spacing, profile), backlash, concentricity, assembly quality. Cost: Tighter tolerances exponentially more expensive—specify only precision actually required.
How much do robotic gears cost?
Volume/complexity-dependent. Small spur gears (module 1-2mm, hobbed): $15-$85/piece. Planetary gearsets (industrial robot joint): $350-$2,500. Harmonic drives (collaborative robot): $800-$6,500. Surgical robot miniature gears (ground, DIN 2): $120-$850/piece. Factors: Accuracy grade, material, quantity, lead time. Lifecycle: Higher-quality gears cost more upfront but eliminate downtime, warranty claims justifying premium.
Can CNC machines cut bevel gears for robots?
Yes—5-axis CNC milling or specialized bevel gear generators (Gleason, Klingelnberg systems). Robotics applications: Right-angle drives (wrist joints, compact designs), differential steering (mobile robots). Challenges: Complex tooth geometry (spiral bevel requires simultaneous 5-axis motion), inspection difficulty, higher cost vs spur/helical. Common: Humanoid robots (ankle/hip joints), specialized industrial robots (space constraints).
What is gear backlash and why does it matter in robotics?
Clearance between mating gear teeth enabling rotation without binding—necessary for lubrication, thermal expansion but causes positioning error (direction reversal introduces lost motion). Impact: Robot positioning accuracy directly limited by backlash. Typical: Industrial robots 0.05-0.15mm, collaborative 0.02-0.05mm, surgical <0.01mm. Reduction: Precision grinding (tighter tolerances), harmonic drives (flex engagement), pre-loaded gearsets (spring-loaded eliminates clearance). Cost: Zero-backlash systems 2-5× more expensive vs standard.
What CNC gear cutting robotics application challenge is preventing confident specification—gear type selection uncertainty, accuracy grade determination, material choice complexity, or cost-performance trade-off analysis?
HOW DO YOU FEEL ABOUT FASHION?
COMMENT OR TAKE OUR PAGE READER SURVEY
Featured





Emotional support animals are a type of support animal that provides comfort to individuals with a mental disability.